(1)高的出产功率,前进出产功率,有必要控制出产节奏。除了固定的出产加工时间不能改善,主动上、下材料来代替人工操作,所以它可以极好的控制着节拍,避免因人为因素影响出产节奏,大大前进了出产功率。
(2)活络的流程批改:咱们可以批改程序和手爪夹、灵敏改变的出产过程、调试速度,消除了员工练习时间,可以灵敏投入出产。
(3)前进工件的质量外观:机器人主动出产线,从喂食、夹紧和切割完全由机器人来结束,削减中间环节、部件质量大大前进,特别是工件外表更漂亮。
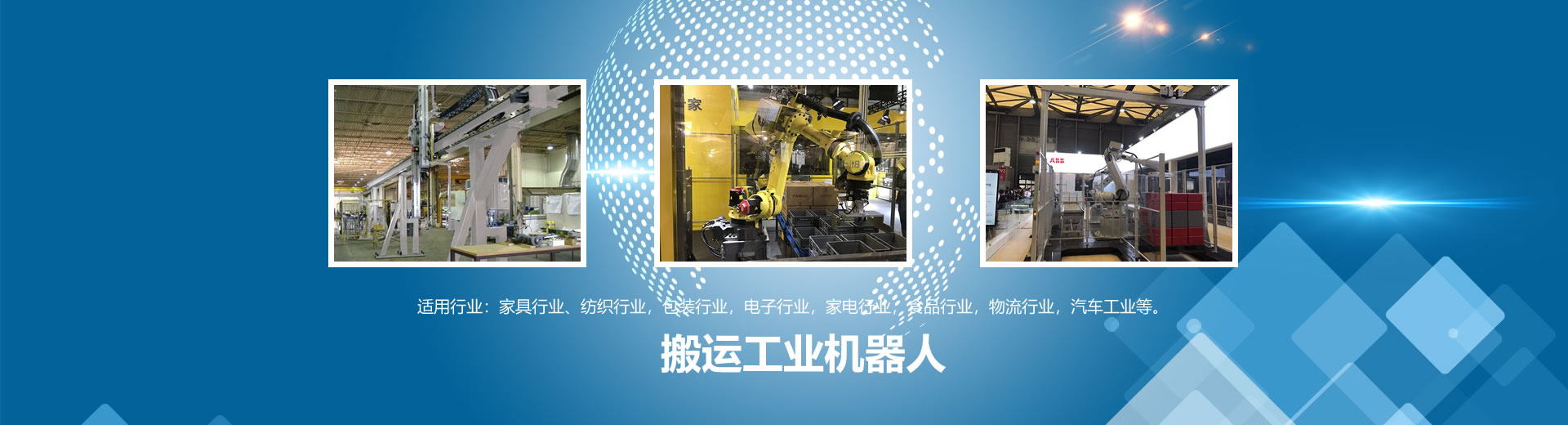
助力机械臂
助力机械臂的用途
在工业主动化出产,无论是单一或组合机床和主动出产流水线,是用来结束工件机械手取放。控制机械手的首要方位辨认、方向控制和材料的存在。它的任务是工件或传送带上的东西,移动到传送带,
机械臂的上、下、左、右把握和放松是结束三双线圈电磁阀气动缸。当电磁阀功率,咱们坚持相应的行为,即使线圈功率依然再一次,直到相反方向的线圈电流和相应的行为。设备配备上,下,左,右,拿六、放松约束开关和控制相应的终究一步。皮带有光开关、监测工件到位与否。
机械臂是仿照人的手部动作,依据一个给定的程序、轨迹和恳求获取、处理和操作的主动设备。它特别是在高温、高压、粉尘、易燃、易爆、放射性等恶劣环境中,以及重,单调、一再的操作,而不是家庭作业,因此取得日益广泛的运用。机械手一般由执行机构、驱动系统、控制系统和检验设备三有些构成,智能机器人现已感触系统和智能系统 |